
人とロボットが一緒に作業をする未来は、すでに少しずつ現実になりつつあります。工場や物流現場で活用されるロボットの話題は増えていますが、今回注目を集めたのは、日本の伝統文化でもある「餅つき」を題材にしたユニークな取り組みです。
ヒューマノイドロボット開発イベント「HUMANOID HACK TOKYO」では、人が餅を返し、ロボットが杵を振り下ろす協調作業を再現したデモが高く評価されました。わずかなタイミングのずれが事故につながる餅つきは、人とロボットの連携を試す題材としても興味深いものです。
さらに今回の取り組みは、単なるロボット制御の実験にとどまりません。人の動きを学び、将来的には職人技や熟練技能の継承にも活用できる可能性を示した点が大きな特徴です。人とロボットが共に働きながら知識や技術を受け継いでいく未来について考えさせられる取り組みとして注目を集めています。
人とロボットが協力する「協調餅つき」が高評価を獲得

2026年5月に開催されたヒューマノイドロボット開発イベント「HUMANOID HACK TOKYO」で、人とヒューマノイドロボットが協力して餅つきを行うデモが高い評価を受けました。
餅つきは、一人が杵を振り下ろし、もう一人が餅を返すことで成り立つ作業です。昔から日本で親しまれてきた伝統的な作業ですが、息が合っていなければ安全に行うことはできません。タイミングが少しでもずれると事故につながる可能性があるため、互いの動きを正確に把握しながら進める必要があります。
今回のデモでは、人が餅を返す役割を担当し、ヒューマノイドロボットが杵を振り下ろします。ロボットはカメラを使って人の手の位置を認識し、手が臼の中にある間は動作を停止。手が離れたことを確認すると杵を振り下ろす仕組みが採用されました。
注目したいのは、ロボットが単独で作業を行うのではなく、人の動きを確認しながら協力して作業を進めている点です。近年は工場や物流施設などでロボットの活用が進んでいますが、人と同じ空間で安全に作業を行うことは大きな課題の一つとなっています。
今回披露された協調餅つきは、人とロボットが互いの動きを理解しながら作業する可能性を示す取り組みとして注目を集めました。安全性と協調性の両立に挑戦した点が評価され、イベントでも高い関心を集めたようです。
なぜ題材に餅つきを選んだのか
人とロボットの協力をテーマにした研究や開発は数多くありますが、その中で今回題材として選ばれたのが「餅つき」でした。一見するとユニークなアイデアにも見えますが、人とロボットの関係性を表現するうえで非常に分かりやすい題材といえます。
餅つきでは、一人が杵を振り下ろし、もう一人が餅を返します。それぞれが別々の作業を担当しながらも、互いの動きを理解し、タイミングを合わせなければなりません。相手の動きを無視して作業を進めることはできず、常に状況を確認しながら行動する必要があります。
この特徴は、人とロボットが同じ空間で協力して働く未来の姿とも重なります。ロボットが自分の作業だけを行うのではなく、人の状態を理解しながら動作を調整することが求められるからです。
また、餅つきは多くの人が一度は見たことがある身近な作業でもあります。そのため、複雑な技術を説明しなくても、「人とロボットが息を合わせて作業する」というテーマを直感的に理解しやすい点も大きな特徴です。
近年はロボット技術の進化によって、自動化や省人化が注目される場面が増えています。しかし今回の取り組みが示したのは、人を置き換えることではなく、人と協力するロボットの可能性です。餅つきという伝統的な作業を通じて、人とロボットが安全に連携する未来のイメージを分かりやすく伝えたことも、高い評価につながった要因の一つと考えられます。
AIは職人技をどのように学んだのか

今回の取り組みでは、人とロボットが協力して餅つきを行うだけでなく、その動きをどのように習得したのかという点にも注目が集まります。特に興味深いのは、熟練者の動きをロボットに学習させるための仕組みです。
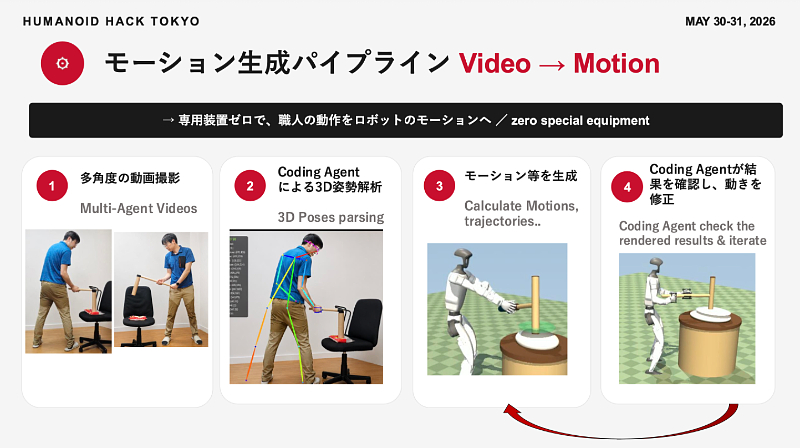
開発では、まず餅つきを行う人の動きを複数の角度から撮影し、その映像をもとに身体の動きを解析しました。そして解析したデータから、ロボットが再現できる動作へと変換しています。一般的には専用の計測機器やモーションキャプチャ装置を利用するケースもありますが、今回は動画データを活用して動作の再現に取り組んだ点が特徴です。
さらに、作成した動作データをそのまま使用するのではなく、シミュレーション環境で何度も学習を重ねています。ロボットは仮想空間の中で繰り返し動作を練習し、より安定して杵を振り下ろせるよう調整が行われました。こうした学習プロセスによって、強い衝撃を伴う餅つきでも安定した動作が可能になったといいます。
また、餅つきには専用の道具である杵を扱う必要があります。そのため開発チームは、杵をしっかり握れるよう独自のハンドも設計しました。3Dプリンターを活用して専用パーツを製作し、餅つきという特殊な動作に対応できるよう工夫されています。
今回の技術は、単に餅をつくためのものではありません。人の動きを解析し、学習し、ロボットが再現できる形へ落とし込む仕組みそのものが大きなポイントです。将来的にはさまざまな作業や技能の習得への応用も期待されており、人とロボットの協力を支える基盤技術として注目されています。
技能継承を支える新しいロボット活用の可能性

今回の取り組みが注目される理由は、ロボットによる餅つきの実演そのものだけではありません。その背景には、日本社会が抱える「技能継承」という課題があります。
日本では少子高齢化が進み、多くの業界で後継者不足が深刻化しています。伝統工芸や製造業、建設業などの現場では、長年の経験によって培われた技術やノウハウを次の世代へ引き継ぐことが難しくなっています。言葉やマニュアルだけでは伝えきれない職人の感覚や判断は、失われれば再現が難しい貴重な財産です。
これまでロボットは、人の作業を自動化したり省力化したりする目的で活用されることが一般的でした。一方で今回の取り組みでは、人を置き換える存在としてではなく、人から学び、技術を受け継ぐ存在としてロボットを活用する考え方が示されています。
人の動きをデータとして記録し、ロボットが再現できる形で残していくことができれば、将来的には熟練者の技術をデジタル資産として保存できる可能性があります。さらに、その技術を次世代の人材育成やロボット開発に活用できるようになれば、これまで継承が難しかった技能を未来へつなぐ新しい方法になるかもしれません。
今回の協調餅つきは一つの実証事例ですが、その先には物流や製造、介護、伝統工芸など幅広い分野への応用も期待されています。人とロボットが協力して働くだけでなく、人の知識や経験を未来へ受け継いでいく――そんな新しいロボット活用の可能性を感じさせる取り組みといえそうです。
人とロボットが共に働く未来への一歩
人とヒューマノイドロボットが協力して餅つきを行う今回の取り組みは、ロボット技術の新たな可能性を示す事例となりました。人の動きを理解し、安全に連携しながら作業を進める姿は、これまでの「自動化」を中心としたロボット活用とは少し異なる方向性を感じさせます。
また、熟練者の動きを学習し、将来的な技能継承につなげようとする考え方も印象的です。後継者不足や高齢化が課題となる中、人の知識や経験をどのように未来へ残していくのかは、多くの業界に共通するテーマとなっています。
今回は餅つきという身近で分かりやすい題材が選ばれましたが、その背景には人とロボットが協力しながら働く未来への挑戦があります。こうした技術が今後どのように発展し、社会のさまざまな現場で活用されていくのか注目したいところです。









